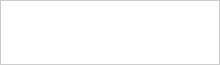
マーテルハンド®の概要
従来のロボットハンドは「握る」「吸いつく」が一般的手法であり、「握る」の場合、運搬物の形状に合わせるセンシング技術が求められ、「吸いつく」の場合、運搬物表面が限定され、特に超重量の運搬には不向きな構造でした。このため、従来のつかむという概念を根本的に換え、「包み込む」「支える」をコンセプトとした、形状フリー、重心フリー、を実現する形状記憶の搬送用ロボットであり、ラテン語の母とその手で包み込むをテーマに命名された商品です。
マーテルハンド®製品紹介動画
段取り替えなしで様々なワークを持てる革新的ハンド
パンフレットダウンロード

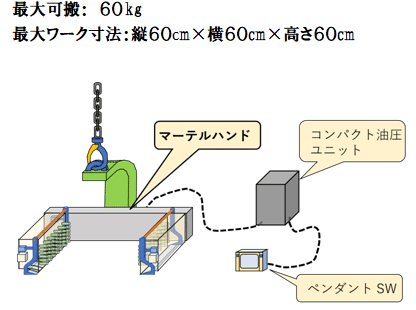
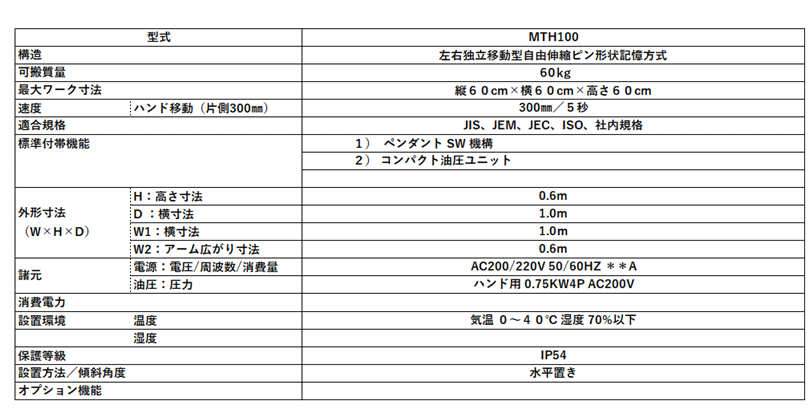
基本仕様
システム構成
マーテルハンド®は、これまでの搬送、移載作業を大きく変える重量物のキャッチングロボットハンドです。
軸ロボットのハンドとして使用するだけでなく、単独でチェーンブロックに取付けが可能であり、重量物の搬送をアシストします。
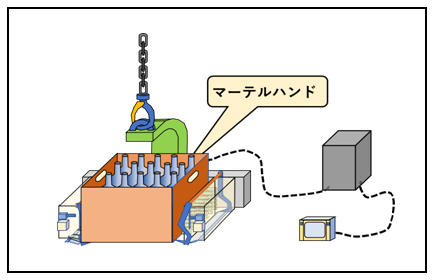
マーテルハンド®による瓶ケースキャッチ例
- ■ハンドピンの自由伸縮による安定キャッチ
- これまでの重量物搬送、移動時には、ワーク形状に合わせた固定処理(パレット固定や、玉掛など)の必要が有りましたが、マーテルハンド®は、両側から抑え込み自由伸縮するピンが形状に合わせ変形ロックすることで、確実に安定キャッチ固定いたします。
- ■コンパクト油圧ユニット採用で低価格実現
- ピン固定は、高圧油圧でがっちり固定される事で、搬送物のズレがありません。また、高圧油圧ユニットは、移動可能なコンパクト設計品であり、大掛かりな油圧システムが不要であり設置場所を選びません。
- ■フレキシブルなオプション対応
- ハンド形状はワーク形状に合わせ、オーダーメイド承ります。
またオプションとして、ワーク材質によりツールチェンジ等フレキシブルなオプション対応が可能です。
機械標準仕様
特許・商標登録
- ■特許取得済み
- 特許第7733362号
- ■商標登録済み
- 登録第6702737号
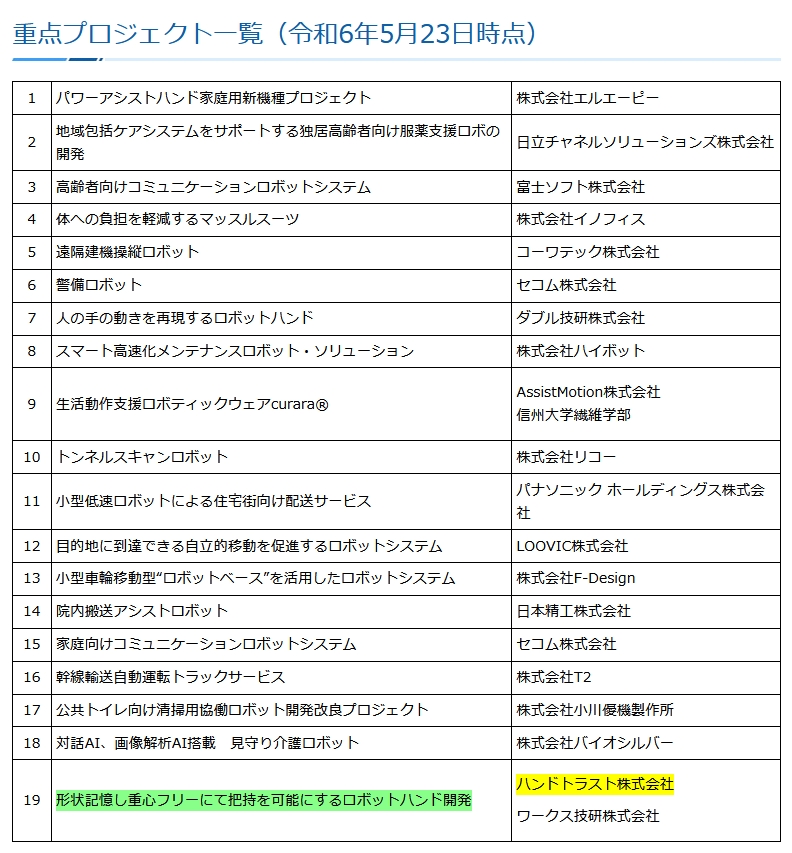
神奈川県「重点プロジェクト」に指定されました!
マーテルハンド®が、神奈川県の重点プロジェクトに指定されました!
神奈川県重点プロジェクトページ
概要
実用化が期待される生活支援ロボットの開発案件で特徴的なものを「重点プロジェクト」として位置づけ、重点プロジェクト支援委員会で積極的に取組を推進していきます。