トンボスロボ®(反転ロボジブ)
トンボスロボ®の概要
重量物の搬送には、天井クレーンやフォークリフトが一般的に使用されますが、天井クレーンの場合、長物重量物の搬送では搬送物が不安定となり、苦手とされています。一方、フォークリフトの場合、長物移動は不向きです。その点トンボスロボ®は、「双腕」であることを生かし、長物重量物の搬送を得意とするだけでなく、その特徴である反転移動方式から、長物重量物を振り回す事無く、まるで「長物重量物が、とんぼ返りする」かの如く移動」し、移動する前と、移動した後の姿が全く同じである事を大きな特徴とする商品です。
基本仕様
トンボスロボ®本体
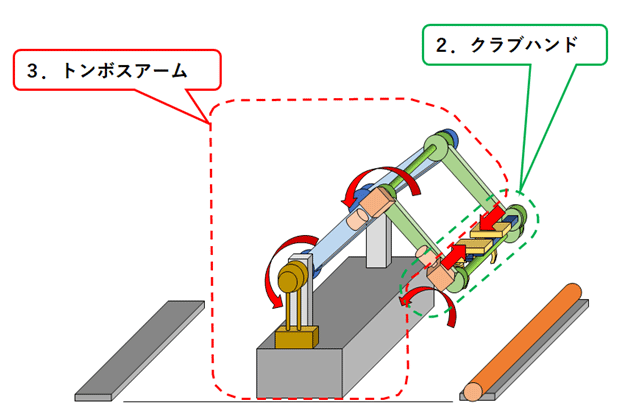
トンボスロボ®本体
ワーク仕様を以下とする。
尚、電源供給におけるブレーカー等は別途追記とする。
(詳細は、構成部品一覧表による。)
※下記仕様(条件)を満足する構成品一式
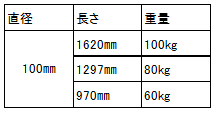
- 材質:鉄
- 重量:100kg、80kg、60kg
- 形状:φ100の円柱
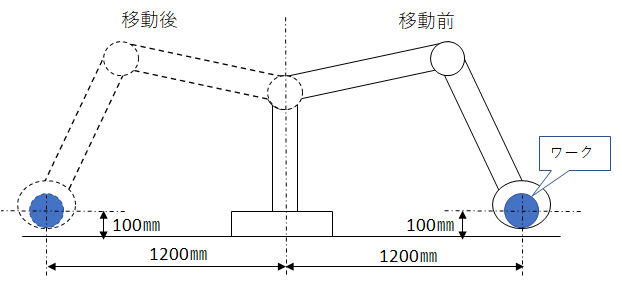
ワーク移動範囲
ワーク移動は、水平方向移動とし、以下の移動前条件位置(固定位置)から移動後(固定位置)までの移動を行う。
- ■移動前ワーク位置
- ワークセンター:床面より100mmの位置
トンボスとワークスの距離:トンボスロボ®の縦柱センターよりワークセンター位置を1200mm - ワークスは、トンボスと並行位置に設置するものとする。
- ■移動先位置
- ワークセンター:床面より100mmの位置
トンボスとワークスの距離:トンボスロボ®の縦柱センターよりワークセンター位置を1200mm - ワークスは、トンボスと並行位置に設置するものとする。
商標登録
- ■商標登録済み
- 登録第6702736号